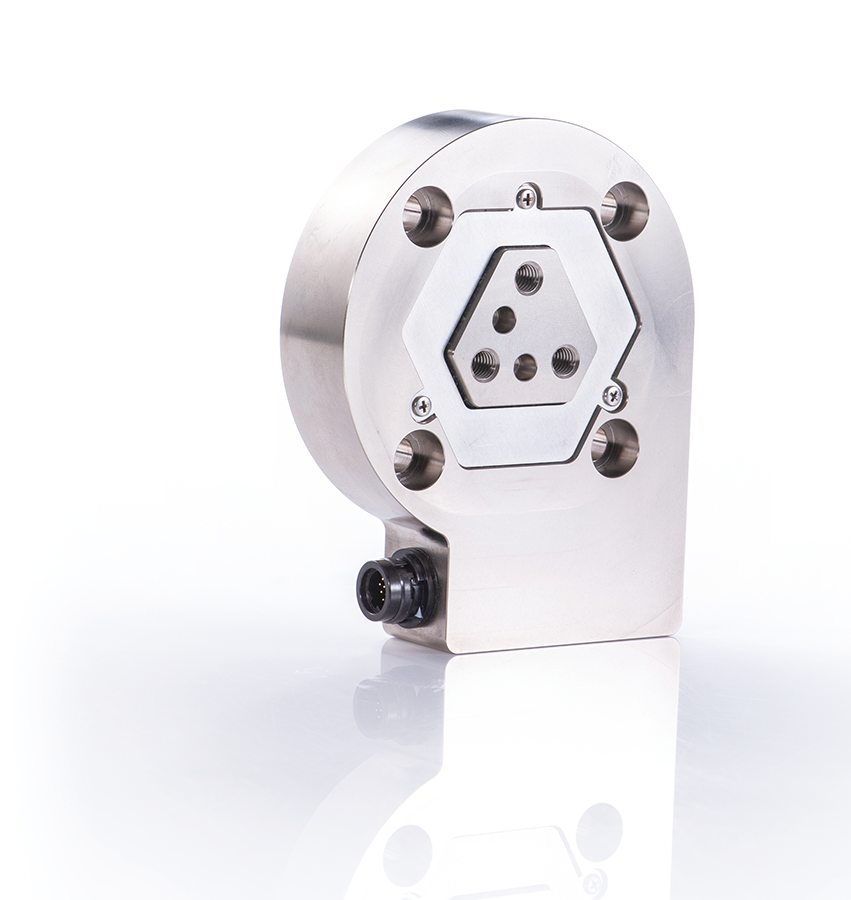
新東工業は4月から、愛知県新城市の同社新城事業所で歪ゲージ式6軸力覚センサ「ZYXer™(ジクサー)」の生産を開始した。
産業用ロボットは近年、生産現場がかかえる人手不足や働き方改革を目指した生産の効率化ニーズを背景に様々な分野で採用が進んでいるが、人の手指に代わる繊細な動きや力を変えるような作業については多くの課題が残っている。
6軸力覚センサは、三次元空間における縦・横・高さ方向の力(Fx,Fy,Fz)とその方向を中心に回転する力(Mx,My,Mz)を同時に計測できるセンサ。
同社の6軸力覚センサは高精度(他社比較25 倍) によりロボットによる精密組立作業を実現したり、高トルク(他社比較2 倍) により従来は不可能だった高精度・高品質なロボットによるバリ取り研磨作業を実現するなど、手指の感覚が求められる巧みの作業から、非常に大きな力が必要となる作業、複雑な力の動きを伴う作業まで、すべての力を高精度に測定できる。
具体的には、耐モーメントを向上させることにより、ロボットアームの移動速度で「業界最高水準」を実現、生産数量の増加やサイクルタイムの削減を可能にしているほか、繊細な力を検出する能力を飛躍的に高めたことで、製品の品質不良やロボットハンドの破損を防ぎ生産の安定を実現している。
腕の力による「押し付け」が必要となる研磨作業や、部品の「はめ合わせ」時に人の指先感覚が必要となる精密な組み付け作業、さらには均一の力で「張り合わせる、塗布する」ための作業など、今まで自動化が難しかった熟練作業をロボットに置き換える目的で、同社の6軸力覚センサへのニーズが高まってきていた。
同社では今後、力覚センサを搭載した各種ロボットのアプリケーションを開発し市場に投入することで、ロボット関連事業の拡大を目指していく。


